
Fra perspektivet af funktionel struktur er udførelsen af vakuumgeneratoren hovedsageligt den elektromagnetiske kontrolventil til at styre vakuumgeneratoren for at realisere negativ trykgenerering og stop for at opnå funktionen til at tiltrække og frigive arbejdsemnet.
Som et resultat omfatter systemet generelt følgende komponenter: 1. Trykluftkilde;2. Filter;3. Skift magnetventil;4. Vakuumaktuator;5. Slutsugekop, airbag osv. (En typisk struktur er vist i figuren nedenfor).
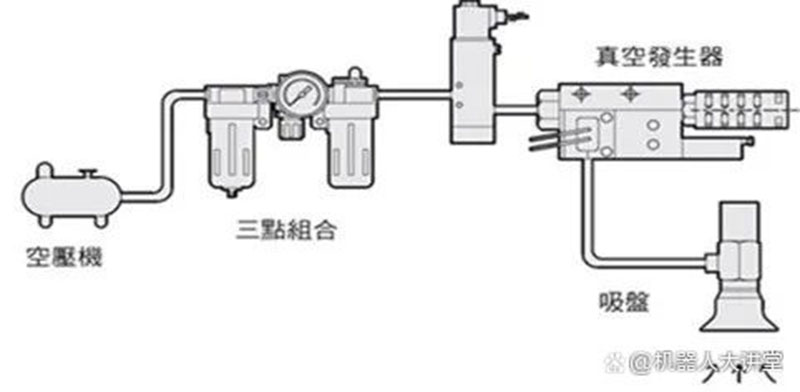
Derudover tilføjer nogle producenter i henhold til kravene til industriel automatisering, for at realisere overvågningen af vakuumadsorptionsprocessen, generelt pneumatiske kontrolkomponenter såsom flowmålere, trykdetektionsafbrydere og nærhedsafbrydere til systemet i de seneste år.
Men da de fleste af komponenterne modificeres af integratoren i henhold til kundernes behov og arbejdsforholdene på stedet, er kompleksiteten af hele systemet ofte høj.
Samtidig fører flere komponentproducenter til komplekst installations- og idriftsættelsesarbejde på stedet, og nogle af dem har et højt energiforbrug og 100 % afhængighed af gaskilder.Delvis integration er muligvis ikke mulig
Undgå støjforurening, hvilket betyder uacceptable problemer for højpræcisions- og højrene miljøer såsom lithiumbatterier og halvledere.
I det hele taget er EVS en ny generation af elektrisk intelligent vakuumaktuator, der ikke kræver en ekstra trykluftkilde, hvilket uden tvivl er iøjnefaldende.
Den største fordel ved det luftbesparende system er dets lette installation.Fordi dette uden tvivl kan reducere mange hjælpekomponenter, herunder luftkompressorer, luftlagringstanke, luftrensningsudstyr og udgangsrør osv., hvilket gør ledningsføringen nemmere og mere bekvem og overskuelig for kunderne at bruge.
Det er rapporteret, at på nuværende tidspunkt har mange scener, herunder mobile robotplatforme, 3C elektronisk samling, fremstilling af lithiumbatterier, fremstilling af halvledere, ekspreslogistik osv. et relativt kompakt rumlayout.
EVS08 suge firkantet batteri
Flere detaljer og fordele
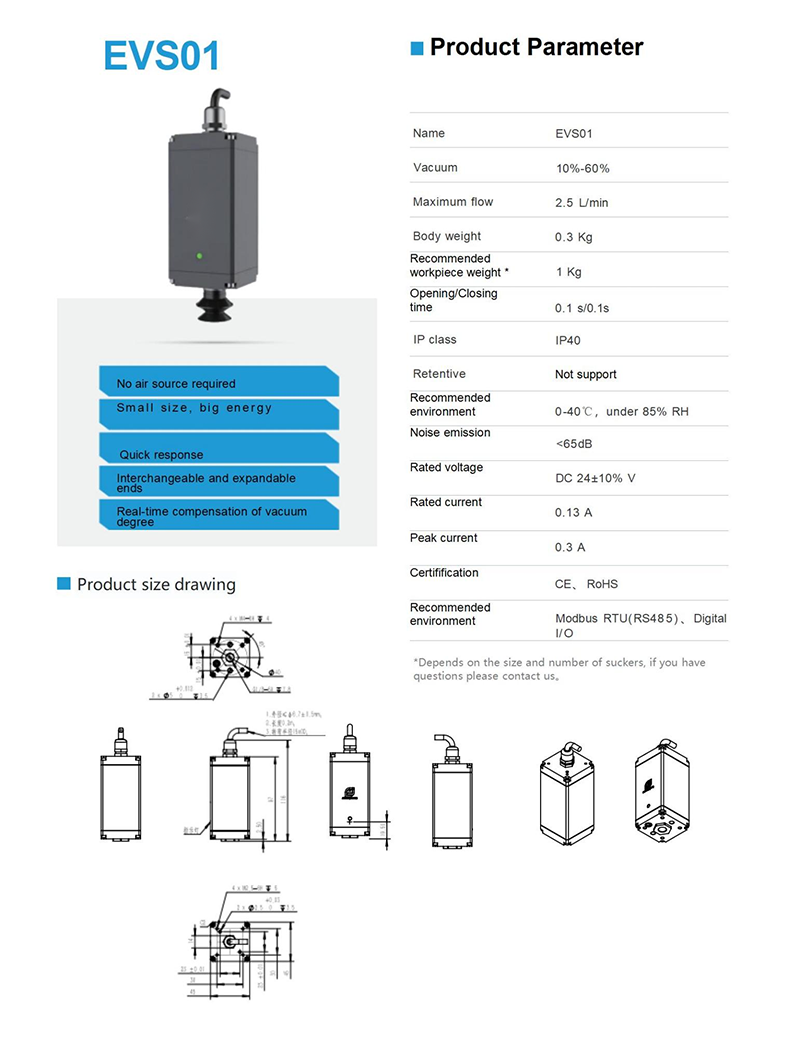
Robotforelæsningssalen erfarede, at dette produkt, der ser meget lille ud og kun vejer 2,5 kg, kan nå et højt niveau på 10 kg.På grund af 24V lavspændingsdesignet er energiforbruget 20% af det traditionelle pneumatiske system, og adsorptionskraften i slutningen kan indstilles og justeres, og adsorptionskraften kan nå 102-510N.
Med hensyn til strukturelt design, vedtager EVS et mere kompakt og let strukturelt design, som gør EVS 30 % mindre end traditionel aerodynamik for den samme belastningsvægt.
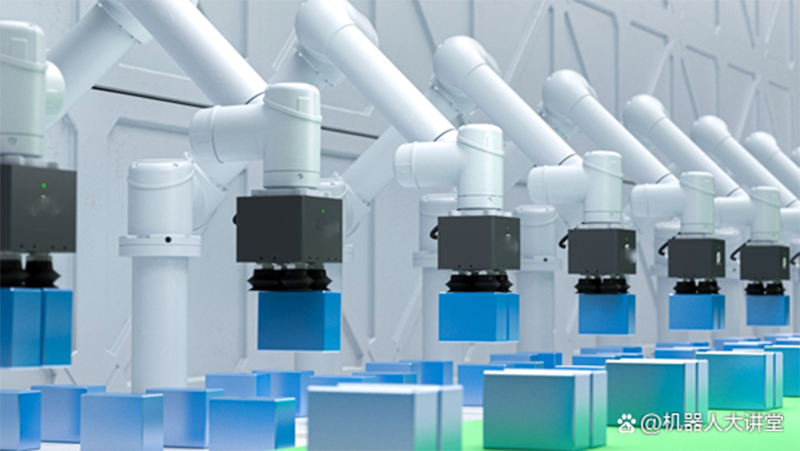
Samtidig kan den forbindes direkte med stikket for enden af robotarmen, hvilket reducerer overflødige hjælpekomponenter, gør det mere fleksibelt at bruge, kan hurtigt implementeres og kan nemt absorbere flere store genstande, specielt velegnet til stabling, håndtering og andre sceneoperationer .
For at forbedre brugervenligheden har den elektriske vakuumaktuator også en integreret grænseflade, som kan bruges til at kontrollere og overvåge hele processen med at adsorbere genstande.
Det rapporteres, at dette er for at gøre det nemmere for kunderne at kontrollere vakuumgraden af vakuumaktuatoren gennem instruktioner og også oprette forbindelse gennem IO-linket til overvågning og forudsigelig vedligeholdelse af adsorptionsprocessen.Statusovervågning vil reducere fejl og nedetid og sikre systemets tilgængelighed.
På dette grundlag afspejles fordelene og egenskaberne ved EVS også i følgende punkter:
1. Kompakt struktur og let vægt: EVS er 30 % mindre end den traditionelle pneumatiske størrelse, når den absorberer den samme belastning.Den kan forbindes med stikket for enden af den mekaniske arm for at realisere absorptionen af belastningen, især velegnet til stabling, håndtering og andre sceneoperationer;
2. Rigelig terminalkonfiguration: Forskellige typer sugekopper, airbags og andre komponenter kan konfigureres til at realisere grebet om forskellige objekter, herunder firkantede, sfæriske og specialformede komponenter;
3. Dobbelt kanaler kan styres uafhængigt: nemt styre venstre og højre side af vakuumaktuatoren, og de to sider er uafhængige af hinanden, hvilket yderligere forbedrer produktionslinjens arbejdseffektivitet.Det realiserer sug og placering på samme tid, hvilket i høj grad letter håndtering og sortering af genstande, hvilket sparer plads og tid;
4. Justerbar sugning: graden af vakuum kan justeres i henhold til egenskaberne af det sugede produkt, og real-time vakuumkompensation kan realiseres;
5. Statusfeedback: Den har en vakuumfeedbacksensor, som kan registrere genstandes adsorptionsstatus i realtid og give feedback og alarm;
6. Sluk-beskyttelse: Efter slukning kan den realisere adsorptions-sluk selvlåsende for at beskytte de adsorberede genstande;
7. Stærk tilpasningsevne: understøtter 24V I/O og MODBUS RTU (RS485) kommunikationsprotokol;
8. Nem at installere og fejlfinde: Kommunikationsprotokollen er enkel og læsbar, hvilket i høj grad reducerer vanskeligheden ved fejlretning.Derudover kan værtscomputerens fejlfindingssoftware vedlægges som en gave, som kan indstilles og redigeres for at indstille funktionsparametre offline.
Konklusion og fremtiden
Under trenden med automatisering og intelligens er elektriske vakuumaktuatorer i stigende grad blevet en nøglekomponent for at sikre normal drift af robotter og automationssystemer, hvilket gør brugen af elektriske aktuatorsystemer mere bekvem og nem at bruge og kan opfylde mere diversificerede scenarier som f.eks. mobile sammensatte robotter..
Den integrerede grænseflade og den omfattende terminalkonfiguration og andre optimeringer kan yderligere forbedre pålideligheden af robottens nøglekomponenter, reducere produktionsstop og fjernimplementeringsproblemer for slutbrugere og yderligere reducere vedligeholdelses- og eftersalgsomkostninger.
Indlægstid: 19-apr-2023